Debugging QEMU¶
Prerequisites¶
The only prerequisites for debugging TRENTOS applications running in
QEMU is the gdb debugger
(https://www.gnu.org/software/gdb).
In addition, we will use gdbgui
(https://www.gdbgui.com), a browser-based gdb
front-end written in Python, which provides some convenience features compared
to the puristic gdb command line.
First, install the gdb-multiarch package:
sudo apt install gdb-multiarch
Then, install the gdbgui tool:
python3 -m pip install --user pipx
python3 -m userpath append ~/.local/bin
# Restart the console to make sure the userpath is updated.
pipx install gdbgui
pipx upgrade gdbgui
After the installation of the gdbgui is complete, you have all the
necessary tools to start debugging TRENTOS applications in QEMU.
Debugging Process¶
The debugging process is demonstrated using the simple Hello World demo from the
Getting Started document. Once you have
built a working system image, you can debug it using gdb and QEMU. Open a
terminal, navigate to the build output directory and execute the QEMU simulate
script as follows.
cd build-zynq7000-Debug-demo_hello_world
# "-S" pauses execution on startup, "-s" starts a GDB server on TCP port 1234
../sdk/scripts/open_trentos_test_env.sh ./simulate --extra-qemu-args="-S -s"
Info: TRENTOS systems are usually comprised of multiple components
(the seL4 microkernel, drivers, services and applications).
Unfortunately,gdb has no multitasking awareness by default and
can only work with one single binary/symbol table. Thus single-stepping
across context switches is not possible and debugging is limited to
following the execution of a single address space.
In a new terminal window, run the command shown below and replace the
<path/to/elf> argument with the path to the ELF file that contains
the application you want to debug. In the Hello World demo, the ELF file
of the main application printing the string is located
at build-zynq7000-Debug-demo_hello_world/os_system/main.instance.bin.
This will start the gdbgui tool and opens a gdb interface in
the default browser:
gdbgui --gdb gdb-multiarch --args <path/to/elf>
The following workspace shall now be opened in the browser:
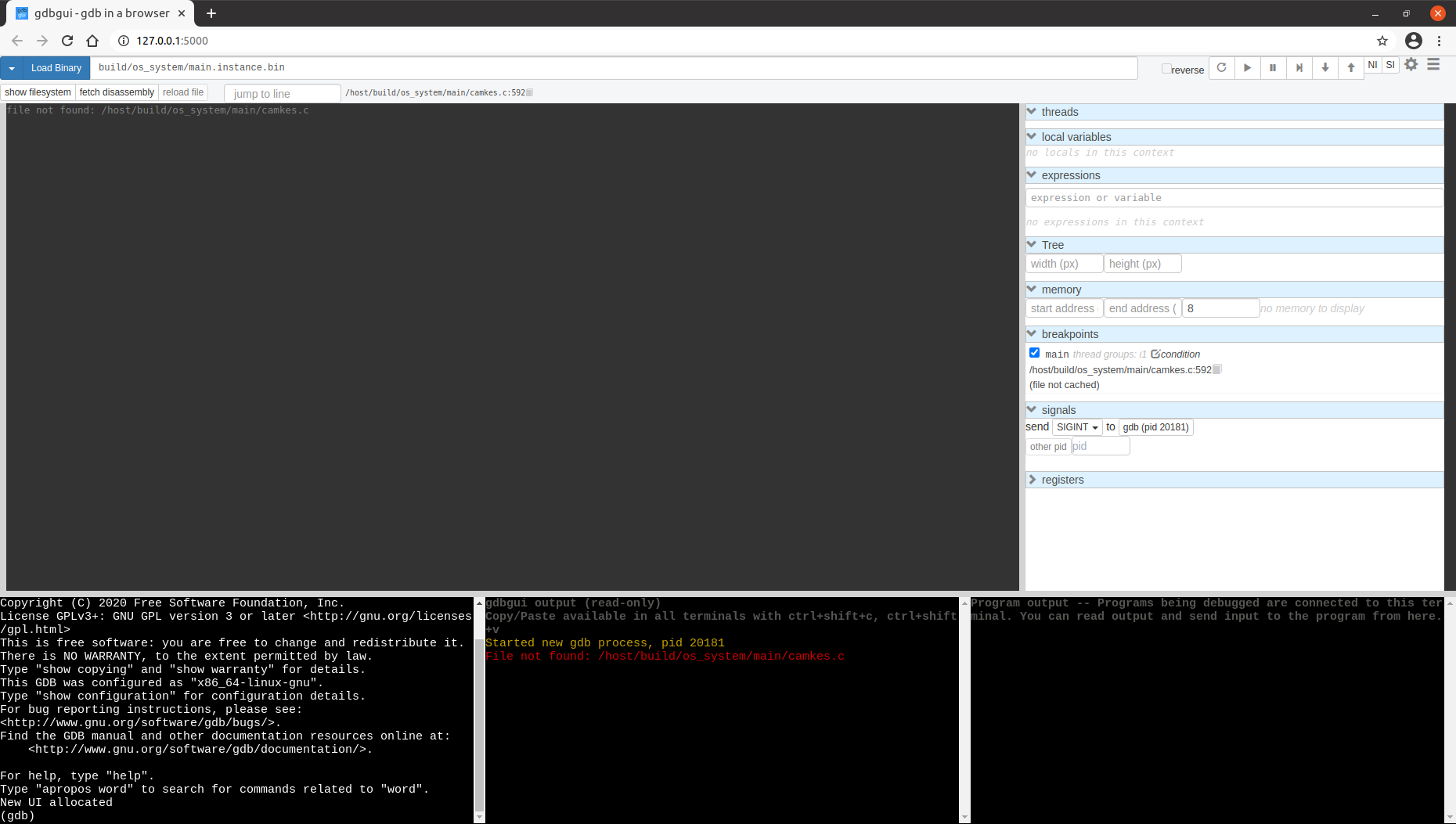
Before connecting to the TCP port opened by the QEMU we should address
the error message shown in the middle terminal in the image above. The
reason gdb can’t find the source files based on the data in the
provided elf file is that the project was built using the
trentos_build container and the paths are set relative to the root
of the container. To fix this it is necessary to execute the following
command in the gdb terminal (see lower-left sub-window of the
gdbgui).
(gdb) set substitute-path /host <ABSOLUTE_PATH_OF_THE_SDK_ROOT_DIRECTORY>
This command replaces the /host part of the path for the source files
with their actual location on the host machine - in this case inside the
SDK root directory. After the command has been executed, clicking on the
show filesystem → Fetch source files buttons in the top left
corner of the window will refresh the file locations and make them
available for visualization of the program execution. For the example of
the Hello World demo, it is convenient to navigate to the main.c file
in
sdk_root_directory/sdk/demos/demo_hello_world/components/hello_world_app/src
since it contains all the executed code in this instance.
The next step is to connect to the TCP port opened by QEMU using the gdb
terminal.
Since QEMU is running inside the trentos_test docker container, it is first necessary to find the IP address of the running container. In order to do so, open a new terminal and run the following command.
$ docker network inspect bridge
[
...
"Containers": {
"c21fb2428d11db64735fb45e9429d89f023c1ad7b4a57cb47acc7216962f5c71": {
"Name": "xenodochial_leakey",
"EndpointID": "d45832ee08e42ccb8bb231fb8904f9d4c16b56f352152a648db12af00bed9f95",
"MacAddress": "02:42:ac:11:00:02",
"IPv4Address": "172.17.0.2/16",
"IPv6Address": ""
}
},
...
]
In the output, under the node Containers, find the IP address of
the running container.
After the IP address of the container is obtained, connect
the gdbgui to QEMU as follows from the gdb terminal:
(gdb) target extended-remote <CONTAINER_IP_ADDRESS>:1234
After a successful connection to QEMU is established, it is possible to
use the standard gdb tools like setting breakpoints, watchpoints,
single stepping, inspecting variables, etc.
An example of this is setting the breakpoint on line 9 of main.c
in the Hello World demo which will halt the demo before printing the
“hello world!” message.
(gdb) break main.c:9
This is also possible to achieve by simply clicking the line number for
the line 9 provided the main.c file is opened in the central
window of the gdbgui interface.
After setting the breakpoint it should be visible on the right side of
the gdbgui interface (by default, the tool sets a breakpoint on
main, which is not the primary entry point in the case of our userspace
Hello World application, so in order to avoid unnecessary breaks this
breakpoint can be disabled by unchecking it). After pressing the
continue button in the taskbar, the program starts and halts at the
breakpoint in the run function and after pressing the continue button
once more, the terminal running QEMU should print the “hello world!”
message.
In order to debug different parts of the system, it is possible to load
different .elf files without closing the gdbgui tool. Simply
write the path to the ELF file you want to switch to in the top input
bar and press “Load Binary”, after which the symbols contained in this
part of the system will become available. It is worth pointing out
that gdb offers auto-complete functionality for entering debug
symbols when, for example, adding a breakpoint or a watchpoint, by
simply pressing tab.
Note: In case the debugged program contains empty loops (e.g. a
delay loop) stepping over these lines might cause gdb to halt and stop
being usable which would require a restart of the debug session. This is
a known issue (discussed here: https://sourceware.org/bugzilla/show_bug.cgi?id=21221)
and does not result from the presented setup. If you encounter this case, it is
enough to place a dummy operation in the body of the loop to remove the issue.
Ease of Use¶
Since during a single debug session it can happen that it is necessary
to start gdbgui and QEMU multiple times, it is possible to make some
adjustments that will make this process easier by automating parts of
it. Instead of manually typing in the commands to substitute the path
and connect to the container, it is possible to place them in a
~/.gdbinit script inside your home directory. This will cause the
gdbgui to execute them upon every start-up which means that the source
files will be automatically loaded correctly and gdbgui will be
connected to the running QEMU and ready for debugging.
set substitute-path /host <ABSOLUTE_PATH_OF_THE_SDK_ROOT_DIRECTORY>
target extended-remote <CONTAINER_IP_ADDRESS>:1234
VS Code Plugin¶
In addition to gdbgui, it is possible to use the VS Code text editor
to debug the applications running in QEMU. This is possible after
installing the necessary extensions and configuring the editor as
required.
Necessary extensions:
C/C++
Cortex-Debug
After the extensions have been installed, it is necessary to configure the debug environment of VS Code. In order to do so, follow these steps:
Open the folder
<sdk_root_folder>/sdkPress
Run → Add Configuration ...Select any shown environment
In case this is the first time
Add Configuration ...is performed, this will create and open alaunch.jsonfile with a template content.If you have already have a
launch.jsonfile, this will open it and add another configuration entry from a template
Delete the content of the new template configuration and paste the following configuration into it. Be sure to:
Replace the <PATH_TO_COMPONENT_ELF_FILE> with the absolute path to the component elf file you wish to debug, e.g.
~/sdk_root_directory/build-zynq7000-Debug-demo_hello_world/os_system/main.instance.binReplace the <CONTAINER_IP_ADDRESS> with the actual IP address of the Docker container - see the previous section
{
"version": "0.2.0",
"configurations": [
{
"type": "cortex-debug",
"request": "attach",
"name": "QEMU",
"cwd": "${workspaceRoot}",
"executable": "<PATH_TO_COMPONENT_ELF_FILE>",
"armToolchainPath": "/usr/bin/",
"servertype": "external",
"gdbTarget": "<CONTAINER_IP_ADDRESS>:1234",
}
]
}
Save the file
launch.jsonGo to
Extensions → Cortex-Debug → Settings → Cortex-debug: Gdb Path → Edit in settings.jsonand add the following member to the JSON object:
"cortex-debug.gdbPath": "/usr/bin/gdb-multiarch",
Save the file
settings.jsonIn order for this setup to work, it is necessary to remove the following line from the
~/.gdbinitfile added for ease of use withgdbguiin the previous section:
target remote <CONTAINER_IP_ADDRESS>:1234
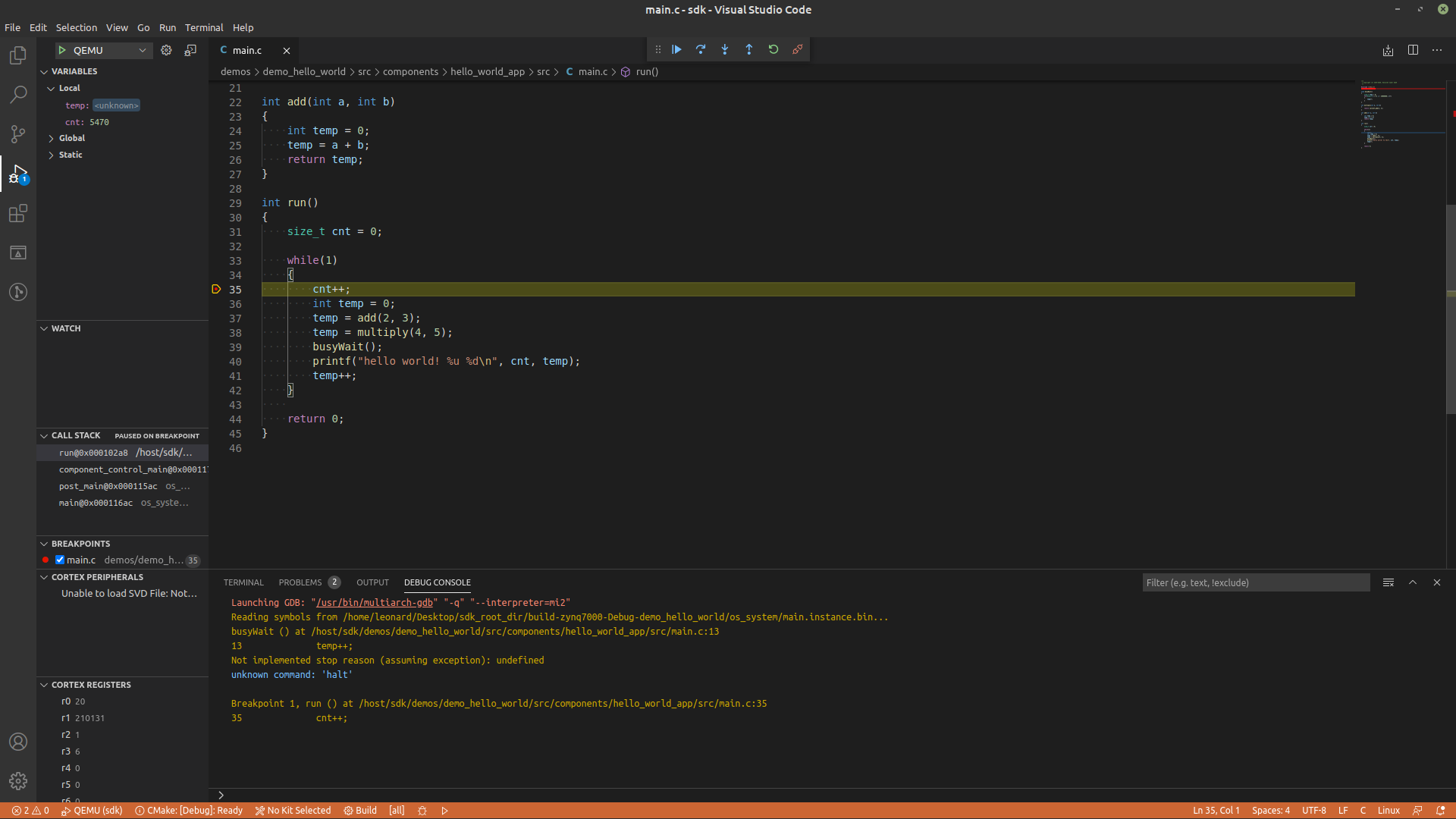
After the setup is finished and the QEMU is started in the container and is
halted (as described in the previous section), it is possible to attach to
the program execution by pressing F5 or Run → Start Debugging in
VS Code. After the connection is successfully established, normal debugging
functions are available similar to gdbgui (this setup can be more convenient
if VS Code is used as the primary source editor).