NVidia Tegra X2¶
This page shall be used to provide an overview of all workpackes that are necessary for the porting of TRENTOS to the Nvidia Tegra X2 SoC.
Main focus here is on supporting the specific Tegra X2 NX version as SoM, used together with the custom carrier board A206 from SeeedStudio.
for a general overview see also
https://en.wikipedia.org/wiki/Tegra
https://en.wikipedia.org/wiki/Nvidia_Jetson
Hardware¶
Tegra X2/X2i (T186)¶
The following provides an overview about the default Nvidia Tegra X2 SoC configuration:
CPU: Nvidia Denver2 ARMv8 (64-bit) dual-core + ARMv8 ARM Cortex-A57 quad-core (64-bit)
RAM: up to 8GB LPDDR4
GPU: Pascal-based, 256 CUDA cores
Tegra X2 NX (T186)¶
The Jetson TX2 NX uses a slightly reduced version of the Nvidia Tegra X2 SoC, containing the following hardware configuration:
CPU: Nvidia Denver2 ARMv8 (64-bit) dual-core + ARMv8 ARM Cortex-A57 quad-core (64-bit)
RAM: up to 4GB LPDDR4
GPU: Pascal-based, 256 CUDA cores
Variants of Nvidia Tegra X1¶
Jetson Nano Version |
Revision |
Reference Carrier Board |
Jetson Module |
Compatible property values |
|---|---|---|---|---|
Jetson TX2 Developer Kit (P2771-0000) |
- |
P2597-0000 |
P3310-1000 |
nvidia,p2597-0000+p3310-1000 |
Jetson TX2 SoM |
- |
P2597-0000 |
P3310-1000 |
|
Jetson TX2i SoM |
- |
P2597-0000 |
P3489-0008 |
|
Jetson TX2 4GB SoM |
- |
P2597-0000 |
P3489-0888 |
|
Jetson TX2 NX SoM |
- |
P2597-0000 |
P3310-1000 |
SBC¶
Nvidia offers the Jetson TX2 in one SBC variant:
Jetson TX2 Developer Kit, which is marked as EOL
8 GiB RAM
32 GiB eMMC 5.1
SoM¶
Nvidia also offers the Jetson TX2 in different SoM versions:
-
8 GiB RAM
32 GiB eMMC 5.1
-
4 GiB RAM
16 GiB eMMC 5.1
-
8 GiB RAM
32 GiB eMMC 5.1
-
4 GiB RAM
16 GiB eMMC 5.1
Carrier Board¶
Nvidia Developer Resources¶
Nvidia JetPack SDK: https://developer.nvidia.com/jetpack-sdk-46
Nvidia L4T
Latest (including Jetson Nano): https://developer.nvidia.com/embedded/linux-tegra-r3261
up to Jetson TK1: https://developer.nvidia.com/linux-tegra-r218
Nvidia Jetson Linux Developer Guide: https://docs.nvidia.com/jetson/l4t/index.html
Nvidia Jetson Nano Community
https://developer.nvidia.com/embedded/community/resources
https://forums.developer.nvidia.com/c/agx-autonomous-machines/jetson-embedded-systems/jetson-nano/76
GPU¶
https://www.kernel.org/doc/html/latest/gpu/tegra.html
https://developer.nvidia.com/shield-open-source
Porting Support¶
Jetson TX2 Platform Adaptation Guide: https://docs.nvidia.com/jetson/l4t/index.html#page/Tegra%20Linux%20Driver%20Package%20Development%20Guide/adaptation_and_bringup_tx2.html
Compilation¶
https://developer.ridgerun.com/wiki/index.php?title=Compiling_Jetson_TX1/TX2_source_code
https://developer.ridgerun.com/wiki/index.php?title=Compiling_Tegra_X2_source_code
Existing seL4 support¶
The mainline seL4 already provides support for the Nvidia Tegra X2 in a limited form and based on specific development boards. According to https://docs.sel4.systems/Hardware/, seL4 currently supports the following platforms:
Jetson TX2 (Nvidia) Previous Nvidia platforms are supported in form of the
Nvidia Tegra K1
Jetson TK1 (Nvidia)
TK1 SOM (Colorado Engineering)
Nvidia Tegra X1
Jetson TX1 (Nvidia)
Resources¶
Technical Reference Manual (TRM): https://developer.nvidia.com/embedded/downloads#?tx=$product,jetson_tx1 (after registration)
Tegra X1 TRM
Tegra X1 TRM
Nvidia Download Center: https://developer.nvidia.com/embedded/downloads
Device Drivers¶
The seL4 already provides basic support for the Jetson TK1, the Jetson TX1 and the Jetson TX2 in a limited form. Support for the Jetson Nano SBC is generally based on the Jetson TX1 SoC, from which baseline support can be adopted.
CMake-build system¶
Data61 |
Comment |
Status |
Task |
|---|---|---|---|
/tools/seL4/cmake-tool/helpers/application_settings.cmake |
okay |
Elfloader¶
Data61 |
Comment |
Status |
Task |
|---|---|---|---|
/tools/seL4/elfloader-tool/src/arch-arm/smp_boot.c |
okay |
check the functionality of the drivers provided |
|
/tools/seL4/elfloader-tool/src/drivers/uart/8250-uart.c |
driver checks for compatibility String nvidia,tegra20-uart, which is available in |
okay |
check the functionality of the drivers provided |
/tools/seL4/elfloader-tool/src/arch-arm/smp_boot.c |
okay |
check the functionality of the drivers provided |
seL4¶
Data61 |
Comment |
Status |
Task |
|---|---|---|---|
/kernel/src/drivers/serial/tegra_omap3_dwapb.c |
driver for the Nvidia UART IP |
okay |
- |
/kernel/src/drivers/serial/config.cmake |
includes the compatibility String nvidia,tegra20-uart for registering the driver available in tegra_omap3_dwapb.c |
okay |
check the functionality of the drivers provided |
/kernel/src/drivers/smmu/config.cmake |
includes the compatibility String arm,mmu-500 for registering the driver available in smmuv2.c |
okay |
check the functionality of the drivers provided |
/kernel/src/drivers/timer/config.cmake |
includes compatibility String arm,armv8-timer for registering the driver available in generic_timer.c |
okay |
check the functionality of the drivers provided |
/kernel/src/plat/tx2/config.cmake |
a new platform (KernelPlatformTx2, PLAT_TX2) was added |
okay |
check the functionality |
/kernel/src/plat/tx2/overlay-tx2.dts |
seL4 seems to boot on the first non-Nvidia core (Cortex-A57) only |
okay |
check if support for the Nvidia Denver cores is required or if the ARM Cortex-A57 cores are sufficient |
/kernel/tools/hardware.yaml |
ARM PMU: arm,armv8-pmuv3 |
okay |
check if some compatibility Strings have to be added here (see Nitrogen6_SoloX porting as a reference) |
/kernel/tools/dts/tx2.dts |
.dts file for the Nvidia Jetson TX2 |
okay |
check the .dts file needs adaptation |
/kernel/tools/hardware/irq.py |
check compatibility String in CONTROLLERS for |
okay |
check if some compatibility Strings have to be added to CONTROLLERS |
Libraries¶
The seL4 libraries can be split into
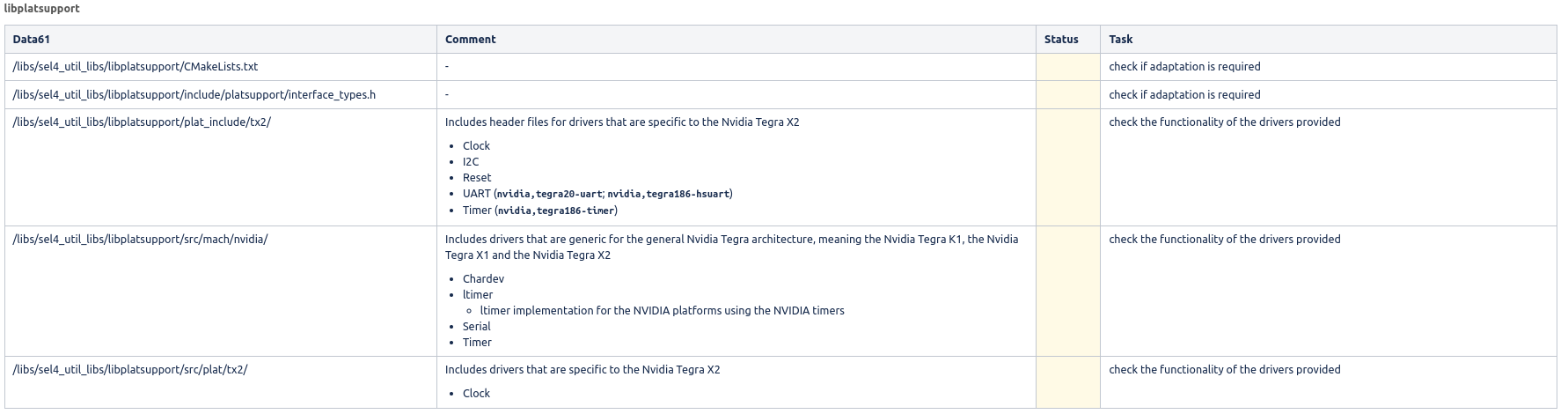
libplatsupport (sel4_util_libs)
libplatsupportports (projects_libs) → a collection of drivers ported from GPL-based sources such as U-Boot and Linux
libtx2bpmp (projects_libs) → a port of the Tegra186 Boot and Power Management Processor (BPMP) interfaces from U-Boot to seL4
libethdrivers (sel4_util_libs)
libsdhcdrivers (projects_libs)
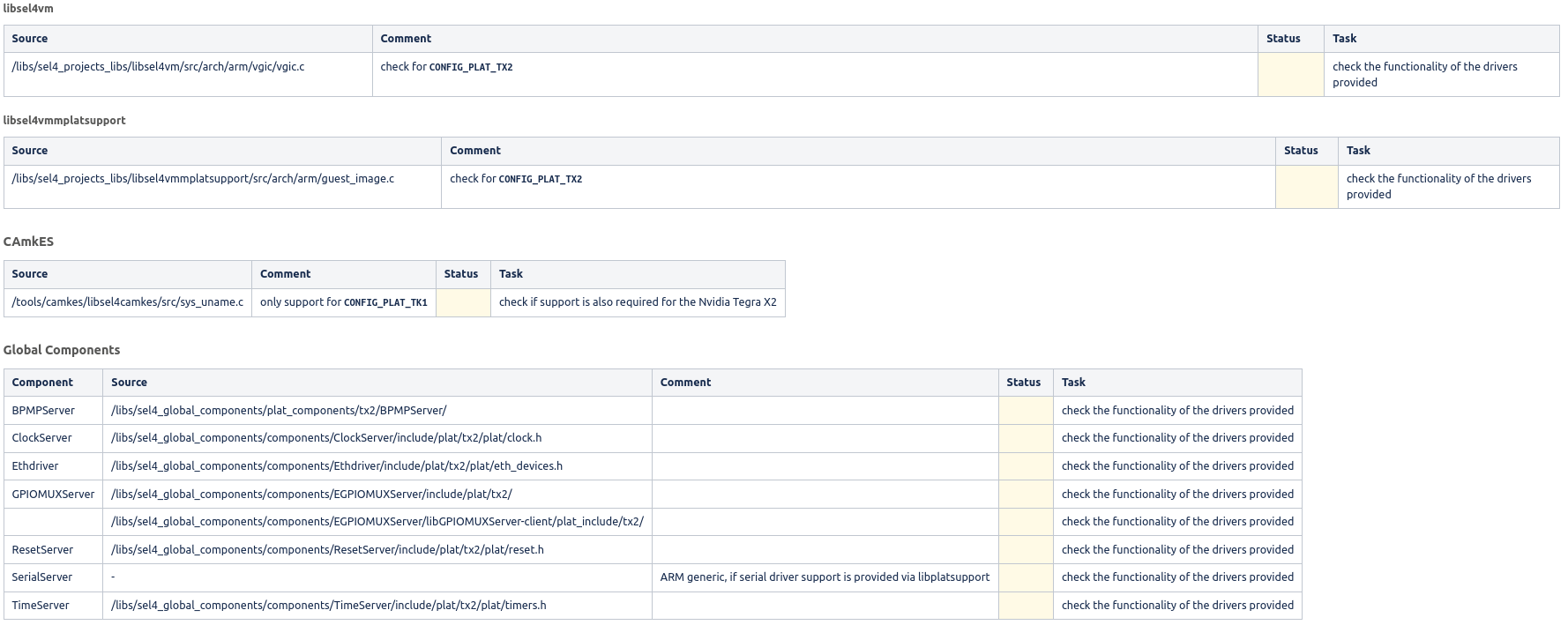
libsel4vm (sel4_projects_libs)
libsel4vmmplatsupport (sel4_projects_libs)
projects_libs¶
libplatsupport¶

libtx2bpmp¶

libethdrivers¶

libsdhcdrivers¶
Currently, there is no support for SDHCI.
libsel4vm¶
U-Boot¶
TODO
Nvidia provides their own U-Boot version with modifications, which is provided as part of their L4T package.
Summary¶
In general, Data61 provides support for the Nvidia Tegra X2 in form of the Jetson TX2 development board. This affects the following parts:
Bootloader support is provided via Nvidia, in form of their custom U-Boot variant, shipped within the L4T bundle
The seL4 basic parts (build support, the seL4 Elfloader, the seL4 kernel) are already provided by Data61
Userspace drivers are provided by Data61 for
Clock
Interrupt
Reset
Timer
UART
Pinmux
GPIO
Additional drivers are provided by Data61 for the Boot and Power Management Processor (BPMP)
Ethernet driver support is provided by Data61 based on U-Boot source code
Current Shortcomings¶
The following parts are currently missing:
SD/MMC
I2C
SPI
USB Furthermore, it seems that Data61 is only providing support for the standard ARM Cortex-A57 cores, but is lacking support for the also ARMv8-A based Nvidia Denver2 cores. In addition, there is also no support for the Nvidia Pascal GPU. This especially affects the usage of CUDA-based GPGPU computing, which is required for machine/deep learning acceleration.
GPU support is currently provided by Nvidia on top of their own Linux distribution, shipped in form of the Linux 4 Tegra (L4T) bundle. Machine/Deep Learning Tools are provided for L4T in form of the Nvidia JetPack SDK. Nevertheless, CUDA is only supported on the proprietary graphics driver by Nvidia, but not by the open source driver Nouveau.
Future Work¶
ZF will definitely be interested in CUDA for Tegra support, as this is required for the machine/deep learning related activities
see Nvidia DRIVE
see Nvidia DRIVE OS
see Nvidia DRIVE OS SDK
CUDA support is currently provided solely based on the Nvidia proprietary drivers for Windows, Linux and MacOS
CUDA support requires the proprietary GPU driver from Nvidia, the open source driver Nouveau doesn’t seem to work
GPU driver support in Linux based on DRM, KMS, … has to be investigated
How can we integrate a driver blob into seL4/TRENTOS-M ???
Can we port drivers (and if yes, to which extent) provided by Nvidia for Linux (L4T) to seL4/TRENTOS ???
Do we require support for further toolkits provided by Nvidia on Linux, e.g. the Nvidia JetPack SDK ???